The Bayes’s theorem is, surprisingly (or unsurprisingly), very simple:
\[
P(B \mid A) = \frac{P(A \mid B) P(B)}{P(A)}
\]
More generally, we can expand it to incorporate the law of total probability to make it more applicable to data analysis. Consider \(B_i\) as one of the \(n\) many possible mutually exclusive events, then \[
\begin{aligned}
P(B_i \mid A) & = \frac{P(A \mid B_i) P(B_i)}{P(A)} \\
& = \frac{P(A \mid B_i) P(B_i)}
{P(A \mid B_1)P(B_1) + P(A \mid B_2)P(B_2) + \cdots +
P(A \mid B_n)P(B_n)} \\
& = \frac{P(A \mid B_i) P(B_i)}{\sum_{k = 1}^n P(A \mid B_k)P(B_k)}
\end{aligned}
\]
If \(B_i\) is a continuous variable, we will replace the sum by an integral, \[
P(B_i \mid A) = \frac{P(A \mid B_i) P(B_i)}{\int_k P(A \mid B_k)P(B_k)}
\] The denominator is not important for practical Bayesian analysis, therefore, it is sufficient to write the above equality as
A police officer stops a driver at random and does a breathalyzer test for the driver. The breathalyzer is known to detect true drunkenness 100% of the time, but in 1% of the cases, it gives a false positive when the driver is sober. We also know that, in general, for every 1,000 drivers passing through that spot, one is driving drunk. Suppose that the breathalyzer shows positive for the driver. What is the probability that the driver is truly drunk?
breathalyzer_test <-ifelse(truly_drunk =="drunk",# If drunk, 100% chance of showing positive"positive",# If not drunk, 1% chance of showing positivesample(c("positive", "negative"), 999000,replace =TRUE, prob =c(.01, .99) ))# Check the probability p(positive | sober)table(breathalyzer_test[truly_drunk =="sober"])
#>
#> negative positive
#> 98903 997
# 997 / 99900 = 0.00997998, so the error rate is less than 1%# Now, Check the probability p(drunk | positive)table(truly_drunk[breathalyzer_test =="positive"])
#>
#> drunk sober
#> 100 997
# 100 / (100 + 997) = 0.0911577, which is only 9.1%!
3.2 Bayesian Statistics
Bayesian statistics is a way to estimate some parameter \(\theta\) (i.e., some quantities of interest, such as the population mean, regression coefficient, etc) by applying Bayes’ Theorem.
\(P(D | \theta)\), the probability that you observe data \(D\), given the parameter \(\theta\); this is called the likelihood (Note: It is the likelihood of \(\theta\), but probability about \(y\))
\(P(\theta)\), the probability distribution \(\theta\), without referring to the data \(D\). This usually requires appeals to one’s degree of belief, and so is called the prior
\(P(\theta | y)\), the updated probability distribution of \(\theta\), after observing the data \(D\); this is called the posterior
On the other hand, classical/frequentist statistics focuses solely on the likelihood function.1 In Bayesian statistics, the goal is to update one’s belief about \(\theta\) based on the observed data \(D\).
3.3 Example 2: Locating a Plane
Consider a highly simplified scenario of locating a missing plane in the sea. Assume that we know the plane, before missing, happened to be flying at the same latitude, heading west across the Pacific, so we only need to find its longitude. We want to go out to collect debris (data) so that we can narrow the location (\(\theta\)) of the plane down.
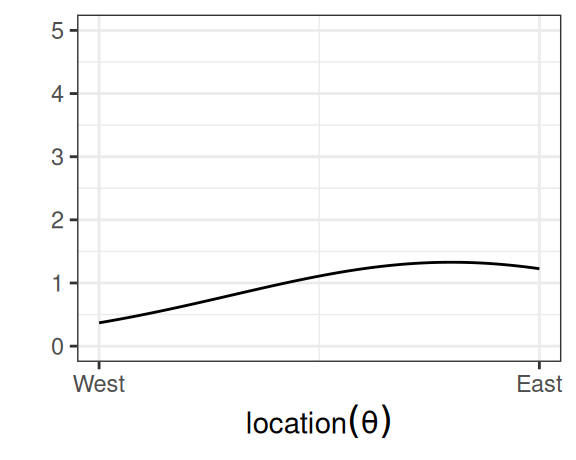
We start with our prior. Assume that we have some rough idea where the plane should be, so we express our belief in a probability distribution like the following:
Figure 3.1: Prior distribution.
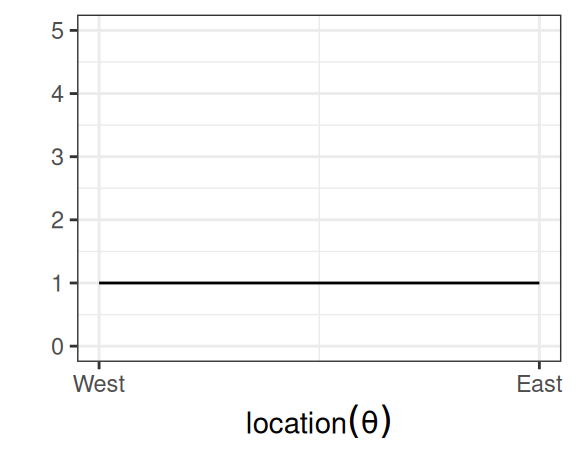
which says that our belief is that the plane is about twice more likely to be towards the east than towards the west. Below are two other options for priors (out of infinitely many), one providing virtually no information and the other encoding stronger information:
(a) Noninformative prior.
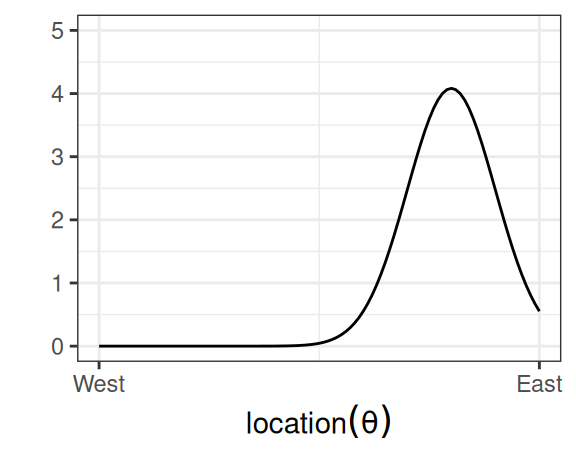
(b) Informative prior.
Figure 3.2: More options for prior distribution.
The prior is chosen to reflect the researcher’s belief, so different researchers will likely formulate a different prior for the same problem, and that’s okay as long as the prior is reasonable and justified. Later, we will learn that in regular Bayesian analyses, with a moderate sample size, different priors generally only make negligible differences.
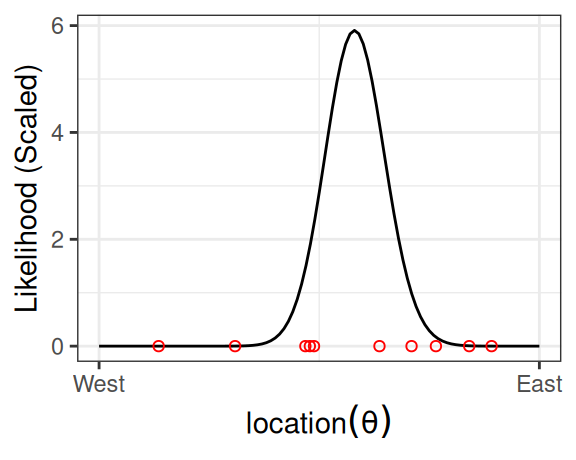
Now, assume that we have collected debris in the locations shown in the graph,
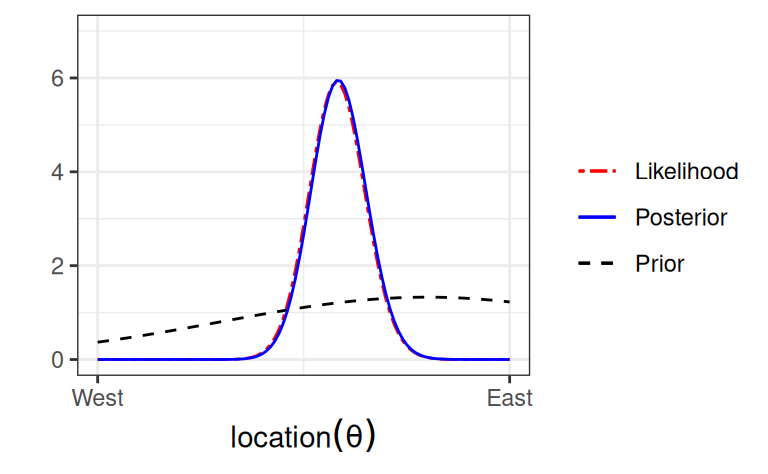
So we can simply multiply the prior probabilities and the likelihood to get the posterior probability for every location. A rescaling step is needed to ensure that the area under the curve will be 1, which is usually performed by the software.
Figure 3.4
As illustrated below, the posterior distribution is a synthesis of (a) the prior and (b) the data (likelihood).
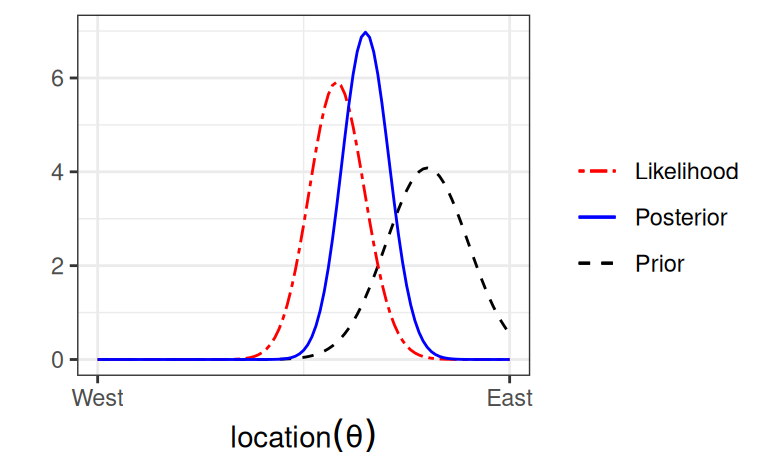
Figure 3.5 shows what happen with a stronger prior:
Figure 3.5
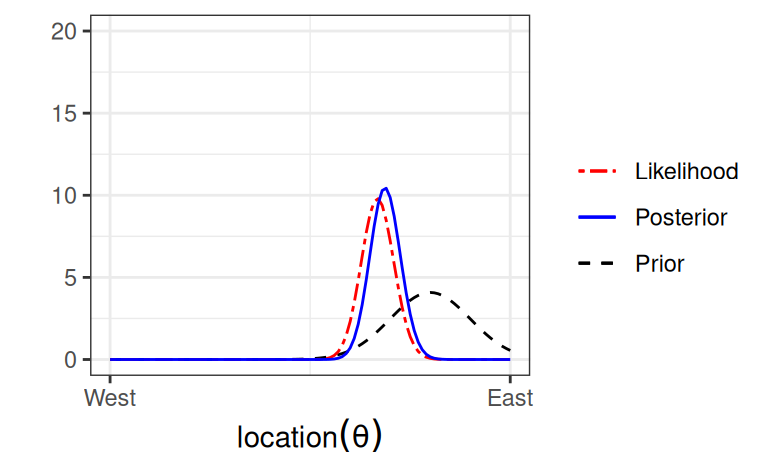
Figure 3.6 shows what happen with 20 more data points:
Figure 3.6
3.4 Data-Order Invariance
In many data analysis applications, researchers collect some data \(D_1\), and then collect some more data \(D_2\). An example would be researchers conducting two separate experiments to study the same research question. In Bayesian statistics, one can consider three ways to obtain the posterior:
Update the belief with \(D_1\), and then with \(D_2\)
Update the belief with \(D_2\), and then with \(D_1\)
Update the belief with both \(D_1\) and \(D_2\) simultaneously
Whether these three ways give the same posterior depends on whether data-order invariance holds. If the inference of \(D_1\) does not depend on \(D_2\), or vice versa, then all three ways lead to the same posterior. Specifically, if we have conditional independence such that \[
P(D_1, D_2 \mid \theta) = P(D_1 \mid \theta) P(D_2 \mid \theta),
\] then one can show all three ways give the same posterior (see section 4.4 and 4.5 of Johnson et al., 2022).
Exchangeability*
Exchangeability is an important concept in Bayesian statistics. Data are exchangeable when the joint distribution, \(P(D_1, \ldots, D_N)\), does not depend on the ordering of the data. A simple way to think about it is if you scramble the order of your outcome variable in your data set and still can obtain the same statistical results, then the data are exchangeable. An example situation where data are not exchangeable is
\(D_1\) is from year 1990, \(D_2\) is from year 2020, and the parameter \(\theta\) changes from 1990 to 2020
When data are exchangeable, conditional independence would generally hold.2
3.5 Bernoulli Likelihood
For binary data \(y\) (e.g., coin flip, pass/fail, diagnosed/not), an intuitive way to analyze is to use a Bernoulli model: \[
\begin{aligned}
P(y = 1 \mid \theta) = \theta \\
P(y = 0 \mid \theta) = 1 - \theta
\end{aligned},
\] which is more compactly written as \[
P(y \mid \theta) = \theta^y (1 - \theta)^{(1 - y)},
\] where \(\theta \in [0, 1]\) is the probability of a “1”. You can verify that the compact form is the same as the longer form.
3.5.1 Multiple Observations
When there are more than one \(y\), say \(y_1, \ldots, y_N\), that are conditionally independent, we have \[
\begin{aligned}
P(y_1, \ldots, y_N \mid \theta) & = \prod_{i = 1}^N P(y_i \mid \theta) \\
& = \theta^{\sum_{i = 1}^N y_i} (1 - \theta)^{\sum_{i = 1}^N (1 - y_i)} \\
& = \theta^z (1 - \theta)^{N - z}
\end{aligned},
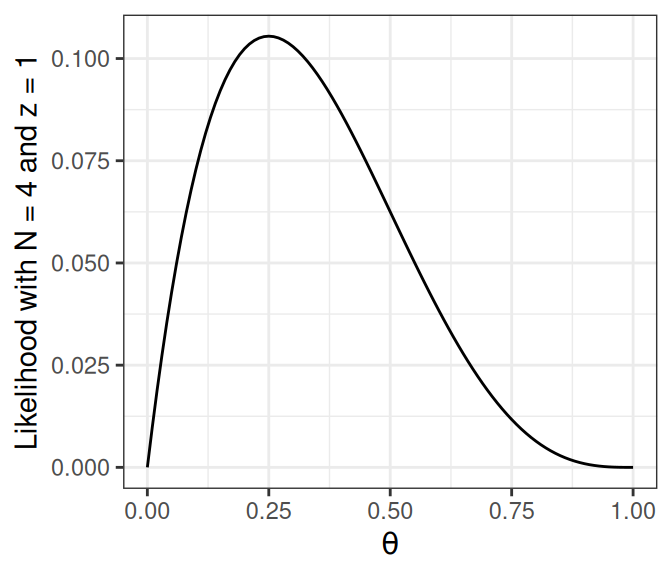
\] where \(z\) is the number of “1”s (e.g., the number of heads in coin flips). Note that the likelihood only depends on \(z\), not the individual \(y\)s. In other words, the likelihood is the same as long as there are \(z\) heads, regardless of when those heads occur.
Let’s say \(N\) = 4 and \(z\) = 1. We can plot the likelihood in R:
# Write the likelihood as a function of thetalik <-function(th, num_flips =4, num_heads =1) { th ^ num_heads * (1- th) ^ (num_flips - num_heads)}# Likelihood of theta = 0.5lik(0.5)
#> [1] 0.0625
# Plot the likelihoodggplot(data.frame(th =c(0, 1)), aes(x = th)) +# `stat_function` for plotting a functionstat_function(fun = lik) +# use `expression()` to get greek letterslabs(x =expression(theta),y ="Likelihood with N = 4 and z = 1")
Figure 3.7: Binomial likelihood function with \(N\) = 4 and \(z\) = 1
3.5.2 Setting Priors
Remember again the relationship between the prior and the posterior: \[P(\theta | y) \propto P(y | \theta) P(\theta)\] The posterior distributions are mathematically determined once the priors and the likelihood are set. However, the mathematical form of the posterior is sometimes very difficult to deal with.
One straightforward, brute-force method is to discretize the parameter space into a number of points. For example, by taking \(\theta\) = 0, 0.05, 0.10, . . . , 0.90, 0.95, 1.00, one can evaluate the posterior at these 21 grid points.
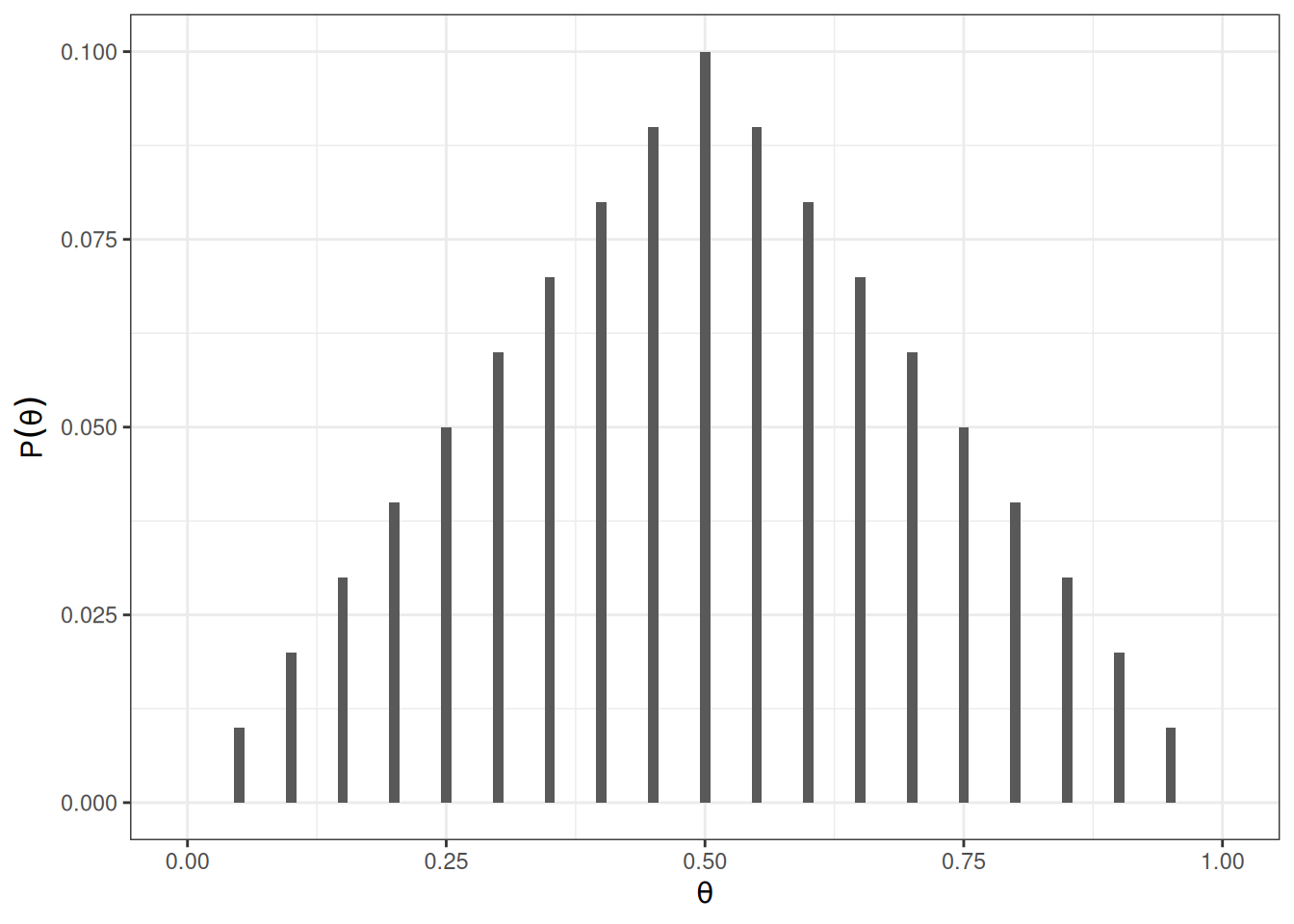
Let’s use a prior that peaks at 0.5 and linearly decreases to both sides. I assume that \(\theta\) = 0.5 is twice as likely as \(\theta = 0.25\) or \(\theta = 0.75\) to reflect my belief that the coin is more likely to be fair.
# Define a grid for the parametergrid_df <-data.frame(th =seq(0, 1, by =0.05))# Set the prior mass for each value on the gridgrid_df$pth <-c(0:10, 9:0) # linearly increasing, then decreasing# Convert pth to a proper distribution such that the value# sum to one1grid_df$pth <- grid_df$pth /sum(grid_df$pth)# Plot the priorggplot(grid_df, aes(x = th, y = pth)) +geom_col(aes(x = th, y = pth),width =0.01, ) +labs(y =expression(P(theta)), x =expression(theta))
1
This line ensures that the probability values sum to one. This is a trick we will use to obtain the posterior probability.
Prior Predictive Distribution
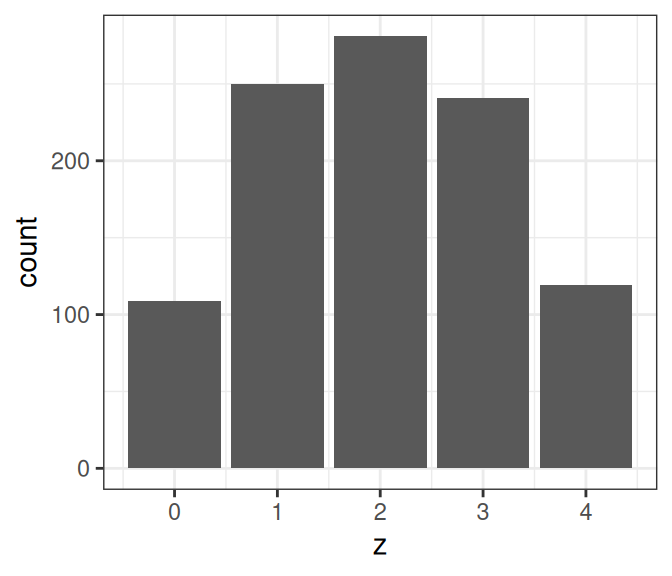
One way to check whether the prior is appropriate is to use the prior predictive distribution. Bayesian models are generative because they can be used to simulate data. The prior predictive distribution can be obtained by first simulating some \(\theta\) values from the prior distribution and then simulating a data set for each \(\theta\).
# Draw one thetanum_trials <-4# number of drawssim_th1 <-sample(grid_df$th, size =1,# based on prior probabilityprob = grid_df$pth)# Simulate new data of four flips based on modelsim_y1 <-rbinom(num_trials, size =1, prob = sim_th1)# Repeat many times# Set number of simulation drawsnum_draws <-1000sim_th <-sample(grid_df$th, size = num_draws, replace =TRUE,# based on prior probabilityprob = grid_df$pth)# Use a for loop# Initialize outputsim_y <-matrix(NA, nrow = num_trials, ncol = num_draws)for (s inseq_len(num_draws)) {# Store simulated data in the sth column sim_y[, s] <-rbinom(num_trials, size =1, prob = sim_th[s])}# Show the first 10 simulated data sets based on prior:sim_y[, 1:10]
# Show the distribution of number of headssim_heads <-colSums(sim_y)ggplot(data.frame(z = sim_heads), aes(x = z)) +geom_bar()
The outcome seems to fit our intuition that it’s more likely to be half heads and half tails, but there is a lot of uncertainty.
3.5.3 Summarizing the Posterior
grid_df <- grid_df |>mutate(# Use our previously defined lik() functionpy_th =lik(th, num_flips =4, num_heads =1),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Print a tableknitr::kable(grid_df)
th
pth
py_th
prior x lik
pth_y
0.00
0.00
0.0000000
0.0000000
0.0000000
0.05
0.01
0.0428687
0.0004287
0.0073359
0.10
0.02
0.0729000
0.0014580
0.0249500
0.15
0.03
0.0921188
0.0027636
0.0472914
0.20
0.04
0.1024000
0.0040960
0.0700927
0.25
0.05
0.1054688
0.0052734
0.0902416
0.30
0.06
0.1029000
0.0061740
0.1056525
0.35
0.07
0.0961187
0.0067283
0.1151381
0.40
0.08
0.0864000
0.0069120
0.1182815
0.45
0.09
0.0748688
0.0067382
0.1153071
0.50
0.10
0.0625000
0.0062500
0.1069530
0.55
0.09
0.0501187
0.0045107
0.0771891
0.60
0.08
0.0384000
0.0030720
0.0525695
0.65
0.07
0.0278687
0.0019508
0.0333832
0.70
0.06
0.0189000
0.0011340
0.0194056
0.75
0.05
0.0117188
0.0005859
0.0100268
0.80
0.04
0.0064000
0.0002560
0.0043808
0.85
0.03
0.0028687
0.0000861
0.0014727
0.90
0.02
0.0009000
0.0000180
0.0003080
0.95
0.01
0.0001187
0.0000012
0.0000203
1.00
0.00
0.0000000
0.0000000
0.0000000
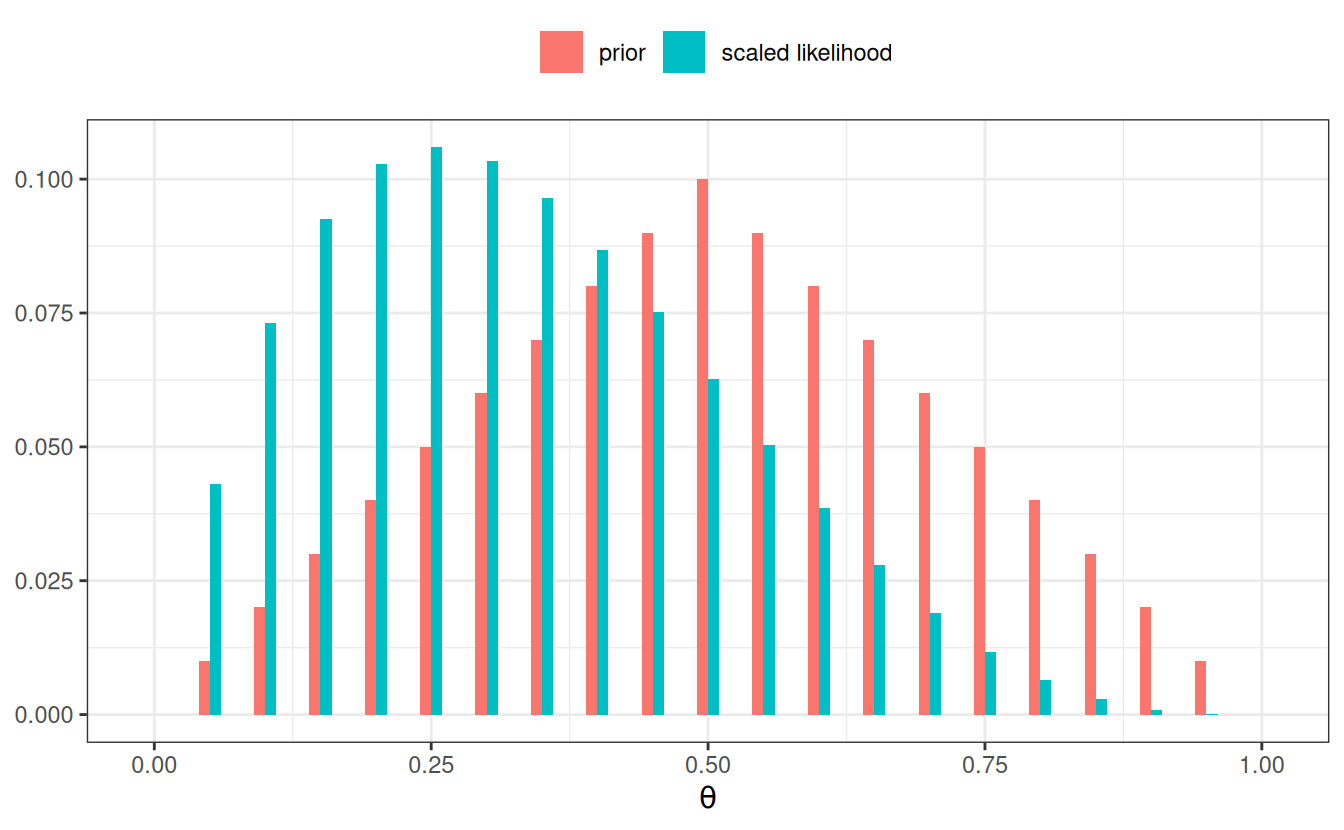
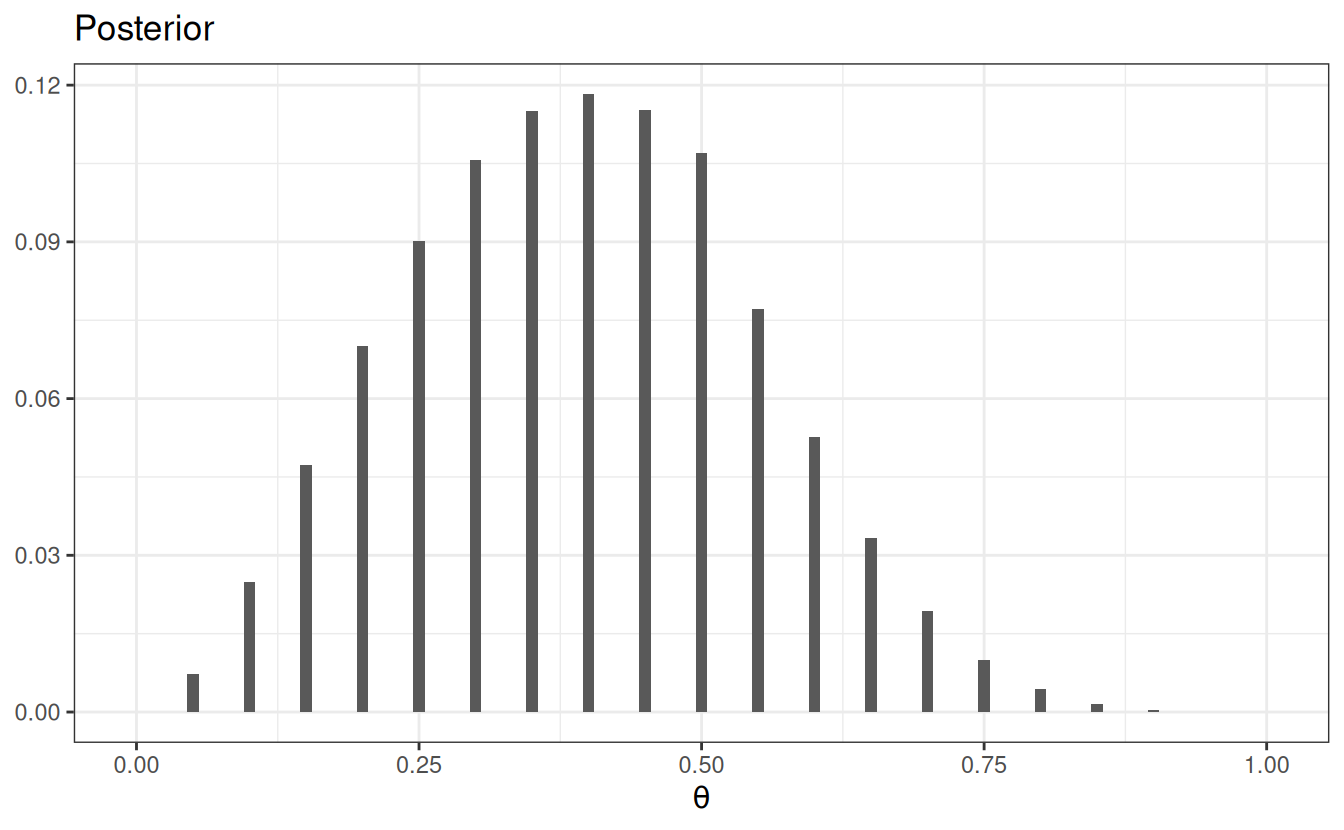
# Plot the prior/likelihood and the posteriorggplot(data = grid_df, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")ggplot(data = grid_df, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )
(a) Prior and likelihood
(b) Posterior
Figure 3.8: Bernoulli posterior distribution
Figure 3.8 (b) shows the posterior distribution, which represents our updated belief about \(\theta\). We can summarize it by simulating \(\theta\) values from it and compute summary statistics:
# Define a function for computing posterior summarysumm_draw <-function(x) {c(mean =mean(x),median =median(x),sd =sd(x),mad =mad(x),`ci.1`=quantile(x, prob = .1, names =FALSE),`ci.9`=quantile(x, prob = .9, names =FALSE) )}# Sample from the posteriorpost_samples <-sample( grid_df$th,size =1000, replace =TRUE,prob = grid_df$pth_y)summ_draw(post_samples)
#> mean median sd mad ci.1 ci.9
#> 0.3848000 0.4000000 0.1538429 0.1482600 0.2000000 0.6000000
# Alternatively, use the `posterior` packagedata.frame(theta = post_samples) |> posterior::summarize_draws()
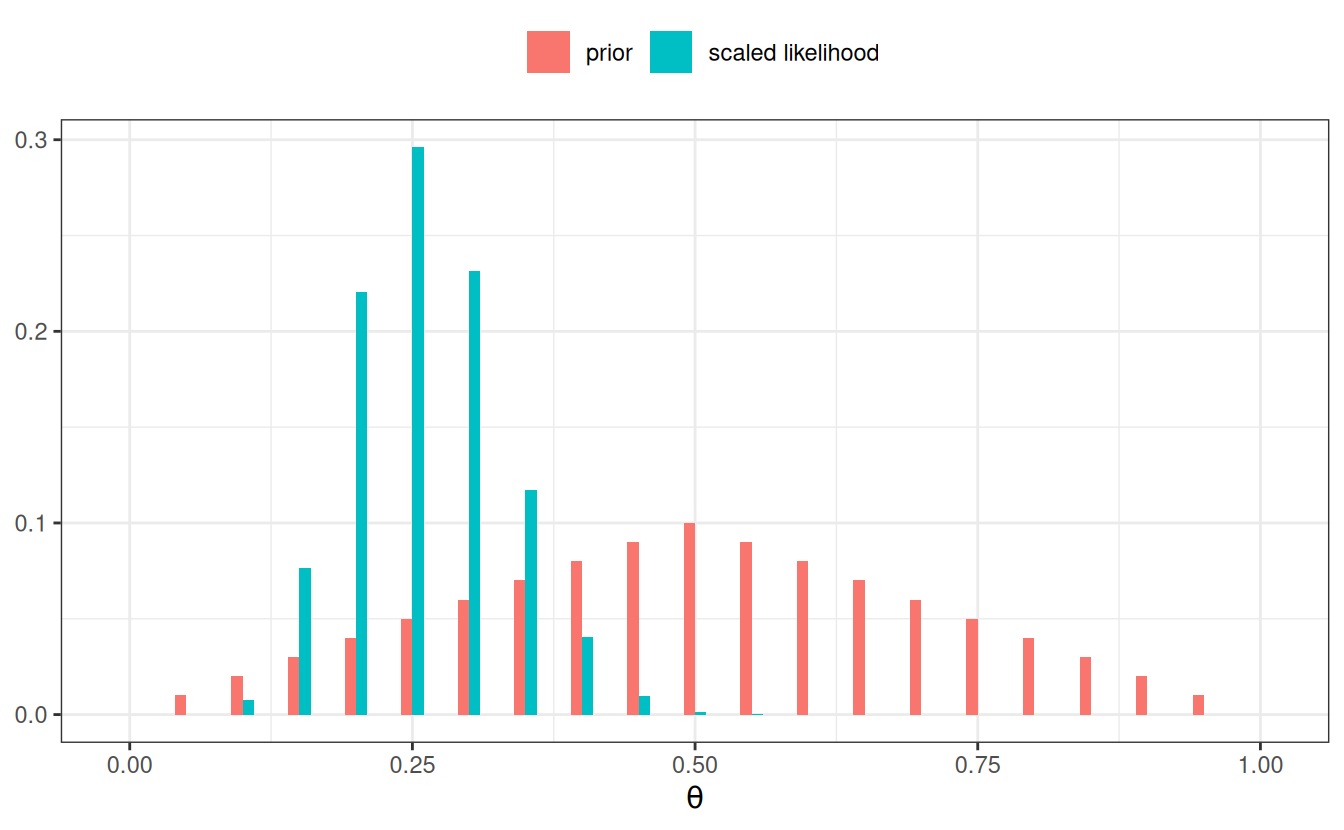
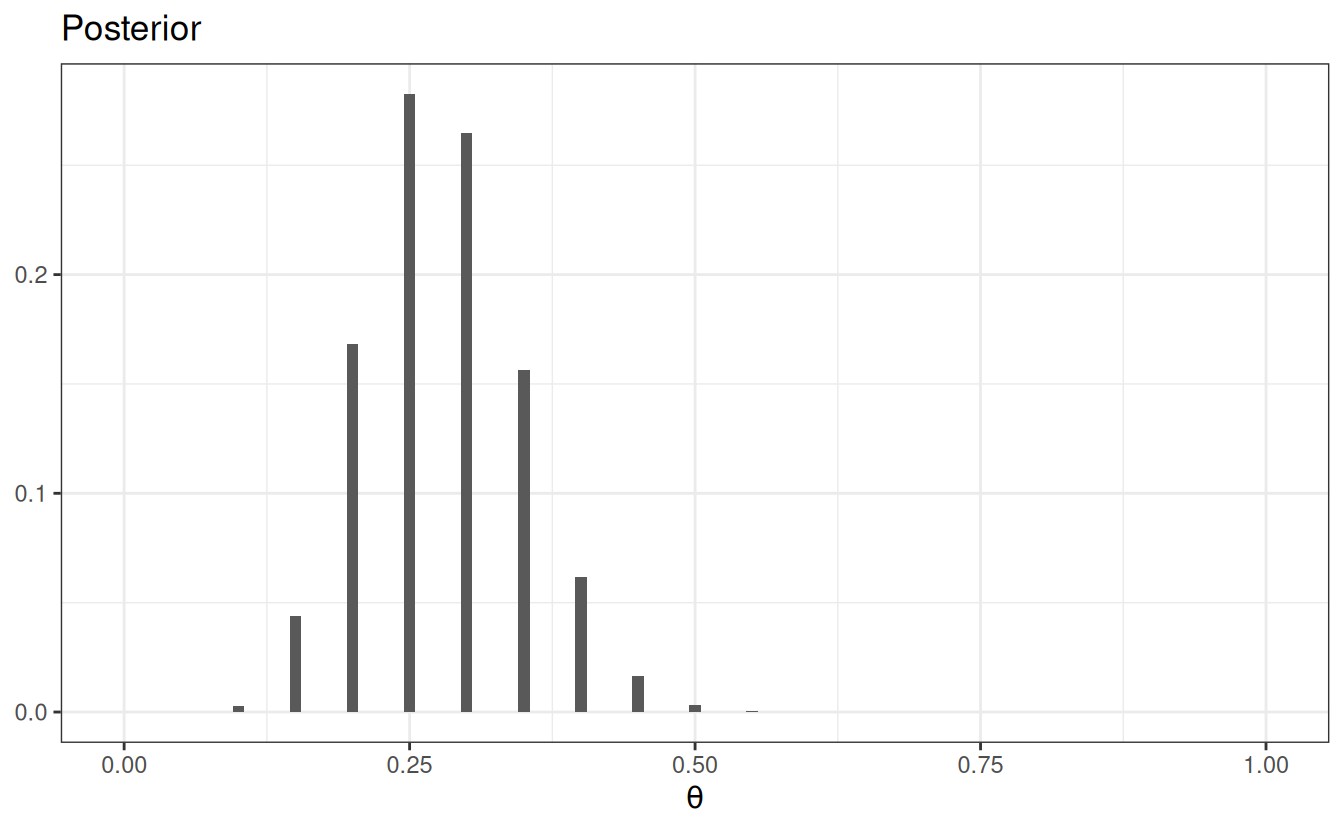
If, instead, we have \(N\) = 40 and \(z\) = 10, the posterior will be more similar to the likelihood.
grid_df2 <- grid_df |>mutate(# Use our previously defined lik() functionpy_th =lik(th, num_flips =40, num_heads =10),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Plot the prior/likelihood and the posteriorggplot(data = grid_df2, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")
ggplot(data = grid_df2, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )
# Sample from the posteriorpost_samples <-sample( grid_df2$th,size =1000, replace =TRUE,prob = grid_df2$pth_y)summ_draw(post_samples)
#> mean median sd mad ci.1 ci.9
#> 0.28085000 0.30000000 0.06542215 0.07413000 0.20000000 0.35000000
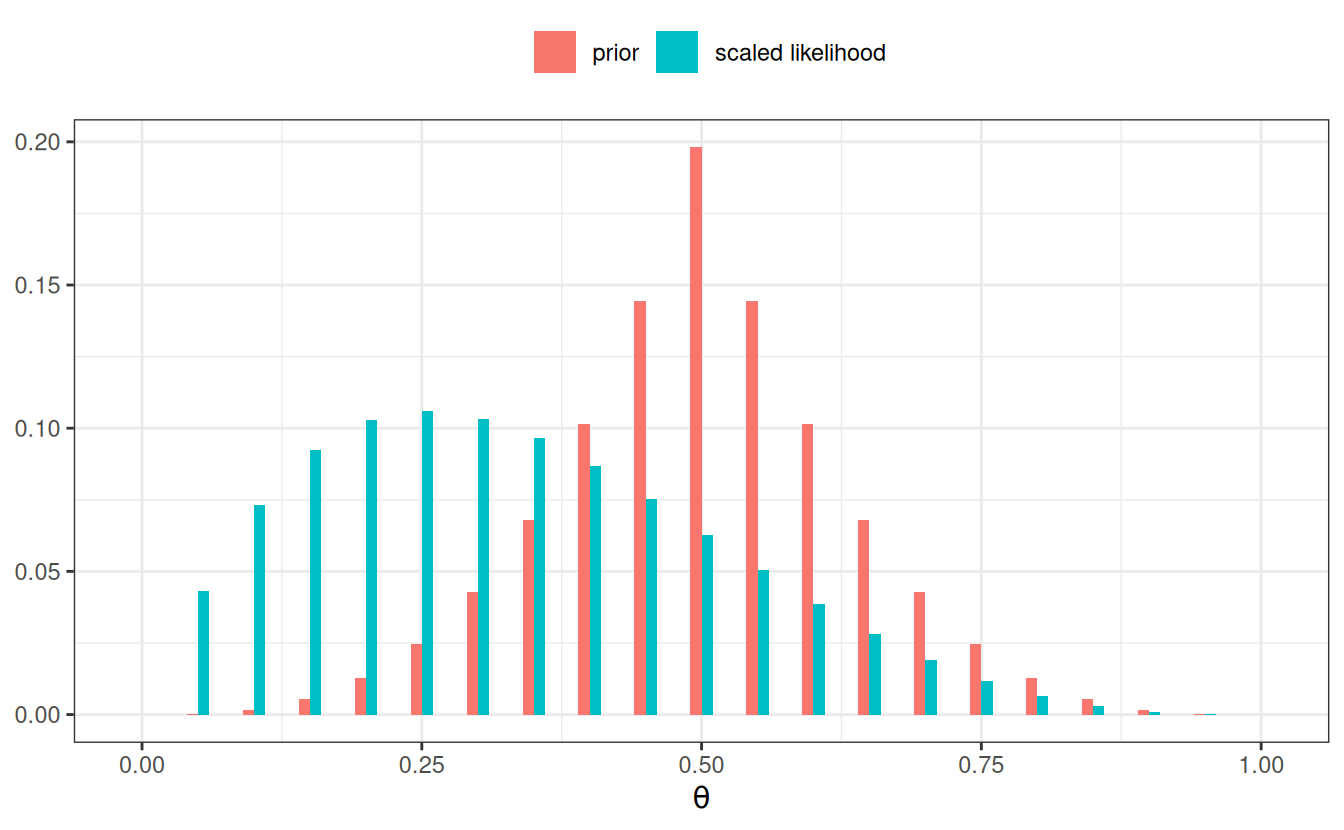
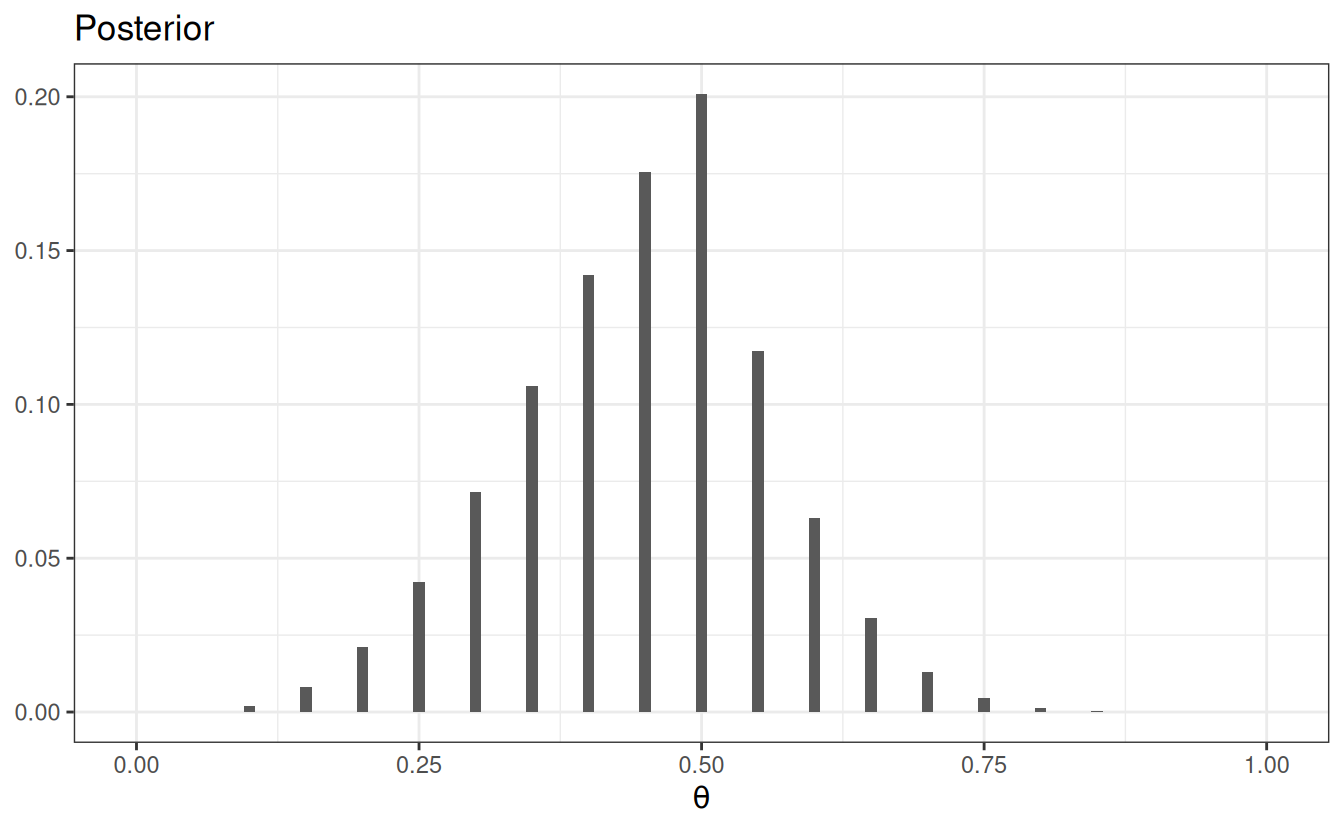
If we have a very strong prior concentrated at \(\theta\) = .5, but still with \(N\) = 40 and \(z\) = 10, the posterior will be more similar to the prior.
grid_df3 <- grid_df |>mutate(# stronger priorpth = pth ^3,# scale the prior to sume to 1pth = pth /sum(pth),# Use our previously defined lik() functionpy_th =lik(th, num_flips =4, num_heads =1),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Plot the prior/likelihood and the posteriorggplot(data = grid_df3, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")
ggplot(data = grid_df3, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )
# Sample from the posteriorpost_samples <-sample( grid_df3$th,size =1000, replace =TRUE,prob = grid_df3$pth_y)summ_draw(post_samples)
#> mean median sd mad ci.1 ci.9
#> 0.4493000 0.4500000 0.1096656 0.0741300 0.3000000 0.6000000
# Alternatively, use the `posterior` packagedata.frame(theta = post_samples) |> posterior::summarize_draws()
3.5.4 Remark on Grid Approximation
In this note, we discretized \(\theta\) into a finite number of grid points to compute the posterior, mainly for pedagogical purposes. A big limitation is that our posterior will have no density for values other than the chosen grid points. While increasing the number of grid points (e.g., 1,000) can give more precision, the result is still not truly continuous. A bigger issue is that the computation breaks down when there is more than one parameter; if there are \(p\) parameters, with 1,000 grid points per parameter, one needs to evaluate the posterior probability for \(1,000^p\) grid points, which is not feasible even with modern computers. So more efficient algorithms, namely Markov chain Monte Carlo (MCMC) methods, will be introduced as we progress in the course.
Johnson, A. A., Ott, M. Q., & Dogucu, M. (2022). Bayes rules! An introduction to Bayesian modeling with R. CRC Press.
The likelihood function in classical/frequentist statistics is usually written as \(P(y; \theta)\). You will notice that here, I write the likelihood for classical/frequentist statistics to be different from the one used in Bayesian statistics. This is intentional: In frequentist conceptualization, \(\theta\) is fixed, and it does not make sense to talk about the probability of \(\theta\). This implies that we cannot condition on \(\theta\), because conditional probability is defined only when \(P(\theta)\) is defined.↩︎
The de Finetti’s theorem shows that when the data are exchangeable and can be considered an infinite sequence (i.e., not from a tiny finite population), then the data are conditionally independent given some \(\theta\).↩︎
Source Code
# Bayes's Theorem```{r}#| label: setup#| include: falseknitr::opts_chunk$set(comment ="#>")comma <-function(x, digits =2L) format(x, digits = digits, big.mark =",")# Load required packageslibrary(tidyverse)theme_set(theme_bw() +theme(panel.grid.major.y =element_line(color ="grey92")))```The Bayes's theorem is, surprisingly (or unsurprisingly), very simple:::: {.callout-important appearance="simple" icon="false"}$$P(B \mid A) = \frac{P(A \mid B) P(B)}{P(A)}$$:::More generally, we can expand it to incorporate the law of total probability to make it more applicable to data analysis. Consider $B_i$ as one of the $n$ many possible mutually exclusive events, then$$\begin{aligned} P(B_i \mid A) & = \frac{P(A \mid B_i) P(B_i)}{P(A)} \\ & = \frac{P(A \mid B_i) P(B_i)} {P(A \mid B_1)P(B_1) + P(A \mid B_2)P(B_2) + \cdots + P(A \mid B_n)P(B_n)} \\ & = \frac{P(A \mid B_i) P(B_i)}{\sum_{k = 1}^n P(A \mid B_k)P(B_k)}\end{aligned}$$If $B_i$ is a continuous variable, we will replace the sum by an integral, $$P(B_i \mid A) = \frac{P(A \mid B_i) P(B_i)}{\int_k P(A \mid B_k)P(B_k)}$$The denominator is not important for practical Bayesian analysis, therefore, it is sufficient to write the above equality as ::: {.callout-important appearance="simple" icon="false"}$$P(B_i \mid A) \propto P(A \mid B_i) P(B_i)$$:::## Example 1: Base rate fallacy (From Wikipedia) ::: {.panel-tabset}### Question {.unnumbered}A police officer stops a driver *at random* and does a breathalyzer test for the driver. The breathalyzer is known to detect true drunkenness 100% of the time, but in 1% of the cases, it gives a false positive when the driver is sober. We also know that, in general, for every 1,000 drivers passing through that spot, one is driving drunk. Suppose that the breathalyzer shows positive for the driver. What is the probability that the driver is truly drunk?### Solution {.unnumbered}$P(\text{positive} | \text{drunk}) = 1$ $P(\text{positive} | \text{sober}) = 0.01$ $P(\text{drunk}) = 1 / 1000$ $P(\text{sober}) = 999 / 1000$Using Bayes' Theorem, $$\begin{aligned} P(\text{drunk} | \text{positive}) & = \frac{P(\text{positive} | \text{drunk}) P(\text{drunk})} {P(\text{positive} | \text{drunk}) P(\text{drunk}) + P(\text{positive} | \text{sober}) P(\text{sober})} \\ & = \frac{1 \times 0.001}{1 \times 0.001 + 0.01 \times 0.999} \\ & = 100 / 1099 \approx 0.091\end{aligned}$$So there is less than a 10% chance that the driver is drunk even when the breathalyzer shows positive. You can verify that with a simulation using R:```{r}#| label: sim-ex1set.seed(4)truly_drunk <-c(rep("drunk", 100), rep("sober", 100*999))table(truly_drunk)breathalyzer_test <-ifelse(truly_drunk =="drunk",# If drunk, 100% chance of showing positive"positive",# If not drunk, 1% chance of showing positivesample(c("positive", "negative"), 999000,replace =TRUE, prob =c(.01, .99) ))# Check the probability p(positive | sober)table(breathalyzer_test[truly_drunk =="sober"])# 997 / 99900 = 0.00997998, so the error rate is less than 1%# Now, Check the probability p(drunk | positive)table(truly_drunk[breathalyzer_test =="positive"])# 100 / (100 + 997) = 0.0911577, which is only 9.1%!```:::## Bayesian Statistics`Bayesian statistics` is a way to estimate some parameter $\theta$ (i.e., some quantities of interest, such as the population mean, regression coefficient, etc) by applying Bayes' Theorem.::: {.callout-important appearance="simple" icon="false"}$$P(\theta | D) \propto P(D | \theta) P(\theta)$$:::There are three components in the above equality:- $P(D | \theta)$, the probability that you observe data $D$, given the parameter $\theta$; this is called the `likelihood` (Note: It is the likelihood of $\theta$, but probability about $y$)- $P(\theta)$, the probability distribution $\theta$, without referring to the data $D$. This usually requires appeals to one's degree of belief, and so is called the *prior*- $P(\theta | y)$, the updated probability distribution of $\theta$, after observing the data $D$; this is called the *posterior*On the other hand, classical/frequentist statistics focuses solely on the likelihood function.[^lik] In Bayesian statistics, the goal is to update one's belief about $\theta$ based on the observed data $D$.[^lik]: The likelihood function in classical/frequentist statistics is usually written as $P(y; \theta)$. You will notice that here, I write the likelihood for classical/frequentist statistics to be different from the one used in Bayesian statistics. This is intentional: In frequentist conceptualization, $\theta$ is fixed, and it does not make sense to talk about the probability of $\theta$. This implies that we cannot condition on $\theta$, because conditional probability is defined only when $P(\theta)$ is defined.## Example 2: Locating a PlaneConsider a highly simplified scenario of locating a missing plane in the sea. Assume that we know the plane, before missing, happened to be flying at the same latitude, heading west across the Pacific, so we only need to find its longitude. We want to go out to collect debris (data) so that we can narrow the location ($\theta$) of the plane down.::: {.panel-tabset}### PriorWe start with our prior. Assume that we have some rough idea where the plane should be, so we express our belief in a probability distribution like the following:```{r}#| label: fig-prior-ex1#| fig-cap: "Prior distribution."#| fig-width: 3#| fig-asp: 0.8#| echo: falsednorm_trunc <-function(x, mean =0, sd =1, ll =0, ul =1) { out <-dnorm(x, mean, sd) / (pnorm(ul, mean, sd) -pnorm(ll, mean, sd)) out[x > ul | x < ll] <-0 out}ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dnorm_trunc, args =list(mean = .8, sd = .5)) +ylim(0, 5) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East"))```which says that our belief is that the plane is about twice more likely to be towards the east than towards the west. Below are two other options for priors (out of infinitely many), one providing virtually no information and the other encoding stronger information:```{r}#| label: fig-more-prior-ex1#| echo: false#| fig-asp: 0.8#| fig-width: 3#| fig-cap: "More options for prior distribution."#| fig-subcap:#| - "Noninformative prior."#| - "Informative prior."#| layout-ncol: 2ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dunif) +ylim(0, 5) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East"))ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dnorm_trunc, args =list(mean = .8, sd = .1)) +ylim(0, 5) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East"))```The prior is chosen to reflect the researcher's belief, so different researchers will likely formulate a different prior for the same problem, and that's okay as long as the prior is reasonable and justified. Later, we will learn that in regular Bayesian analyses, with a moderate sample size, different priors generally only make negligible differences.### LikelihoodNow, assume that we have collected debris in the locations shown in the graph, ```{r}#| label: fig-likelihood-ex1#| echo: false#| fig-width: 3#| fig-asp: 0.8qnorm_trunc <-function(p, mean =0, sd =1, ll =0, ul =1) { cdf_ll <-pnorm(ll, mean = mean, sd = sd) cdf_ul <-pnorm(ul, mean = mean, sd = sd)qnorm(cdf_ll + p * (cdf_ul - cdf_ll), mean = mean, sd = sd)}rnorm_trunc <-function(n, mean =0, sd =1, ll =0, ul =1) { p <-runif(n)qnorm_trunc(p, mean = mean, sd = sd, ll = ll, ul = ul)}grid <-seq(0, 1, length.out =101)compute_lik <-function(x, pts = grid, sd =0.2, binwidth = .01) { lik_vals <-vapply(x, dnorm_trunc,mean = pts, sd = sd,FUN.VALUE =numeric(length(pts)) ) lik <-apply(lik_vals, 1, prod) lik /sum(lik) / binwidth}set.seed(4)dat_x <-rnorm_trunc(10, mean =0.6, sd =0.2)lik_x <-compute_lik(dat_x)ggplot(data.frame(x = grid, dens = lik_x),aes(x = x, y = dens)) +geom_line() +geom_point(data =data.frame(x = dat_x), aes(x = x), y =0,shape =1, col ="red" ) +labs(y ="Likelihood (Scaled)", x =expression(location(theta))) +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East"))```### PosteriorNow, from Bayes's Theorem,$$\text{Posterior Probability} \propto \text{Prior Probability} \times \text{Likelihood}$$So we can simply multiply the prior probabilities and the likelihood to get the posterior probability for every location. A rescaling step is needed to ensure that the area under the curve will be 1, which is usually performed by the software.```{r}#| label: fig-posterior-ex1#| echo: false#| fig-width: 4#| fig-asp: 0.618update_probs <-function(prior_probs, lik, binwidth = .01) { post_probs <- prior_probs * lik post_probs /sum(post_probs) / binwidth}ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dnorm_trunc, args =list(mean = .8, sd = .5),aes(linetype ="Prior", col ="Prior") ) +geom_line(data =data.frame(x = grid, dens = lik_x),aes(x = x, y = dens, linetype ="Likelihood",col ="Likelihood" ) ) +geom_line(data =data.frame(x = grid,dens =update_probs(dnorm_trunc(grid, .8, .5), lik_x ) ),aes(x = x, y = dens, col ="Posterior", linetype ="Posterior") ) +ylim(0, 7) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East")) +scale_color_manual("", values =c("red", "blue", "black")) +scale_linetype_manual("", values =c("twodash", "solid", "dashed"))```:::As illustrated below, the posterior distribution is a synthesis of (a) the prior and (b) the data (likelihood).::: {.panel-tabset}### Influence of Prior@fig-posterior-ex1-prior shows what happen with a stronger prior:```{r}#| label: fig-posterior-ex1-prior#| echo: false#| fig-width: 4#| fig-asp: 0.618ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dnorm_trunc, args =list(mean = .8, sd = .1),aes(linetype ="Prior", col ="Prior") ) +geom_line(data =data.frame(x = grid, dens = lik_x),aes(x = x, y = dens, linetype ="Likelihood",col ="Likelihood" ) ) +geom_line(data =data.frame(x = grid,dens =update_probs(dnorm_trunc(grid, .8, .1), lik_x ) ),aes(x = x, y = dens, col ="Posterior", linetype ="Posterior") ) +ylim(0, 7) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East")) +scale_color_manual("", values =c("red", "blue", "black")) +scale_linetype_manual("", values =c("twodash", "solid", "dashed"))```### Influence of More Data@fig-posterior-ex1-data shows what happen with 20 more data points:```{r}#| label: fig-posterior-ex1-data#| echo: false#| fig-width: 4#| fig-asp: 0.618dat_x <-c(dat_x, rnorm_trunc(20, mean =0.6, sd =0.2))lik_x <-compute_lik(dat_x)ggplot(data.frame(x =c(0, 1)), aes(x = x)) +stat_function(fun = dnorm_trunc, args =list(mean = .8, sd = .1),aes(linetype ="Prior", col ="Prior") ) +geom_line(data =data.frame(x = grid, dens = lik_x),aes(x = x, y = dens, linetype ="Likelihood",col ="Likelihood" ) ) +geom_line(data =data.frame(x = grid,dens =update_probs(dnorm_trunc(grid, .8, .1), lik_x ) ),aes(x = x, y = dens, col ="Posterior", linetype ="Posterior") ) +ylim(0, 20) +labs(x =expression(location(theta)), y ="") +scale_x_continuous(breaks =c(0, 1), labels =c("West", "East")) +scale_color_manual("", values =c("red", "blue", "black")) +scale_linetype_manual("", values =c("twodash", "solid", "dashed"))```:::## Data-Order InvarianceIn many data analysis applications, researchers collect some data $D_1$, and then collect some more data $D_2$. An example would be researchers conducting two separate experiments to study the same research question. In Bayesian statistics, one can consider three ways to obtain the posterior:1. Update the belief with $D_1$, and then with $D_2$2. Update the belief with $D_2$, and then with $D_1$3. Update the belief with both $D_1$ and $D_2$ simultaneouslyWhether these three ways give the same posterior depends on whether **data-order invariance** holds. If the inference of $D_1$ does not depend on $D_2$, or vice versa, then all three ways lead to the same posterior. Specifically, if we have **conditional independence** such that$$P(D_1, D_2 \mid \theta) = P(D_1 \mid \theta) P(D_2 \mid \theta),$$then one can show all three ways give the same posterior [[see section 4.4 and 4.5 of @johnson2022]](https://www.bayesrulesbook.com/chapter-4#ch4-sequential).::: {.callout-tip}## Exchangeability*Exchangeability is an important concept in Bayesian statistics. Data are exchangeable when the joint distribution, $P(D_1, \ldots, D_N)$, does not depend on the ordering of the data. A simple way to think about it is if you scramble the order of your outcome variable in your data set and still can obtain the same statistical results, then the data are exchangeable. An example situation where data are not exchangeable is- $D_1$ is from year 1990, $D_2$ is from year 2020, and the parameter $\theta$ changes from 1990 to 2020When data are exchangeable, conditional independence would generally hold.[^deFinetti][^deFinetti]: The [de Finetti's theorem](https://en.wikipedia.org/wiki/De_Finetti%27s_theorem) shows that when the data are exchangeable and can be considered an infinite sequence (i.e., not from a tiny finite population), then the data are conditionally independent given some $\theta$.:::## Bernoulli LikelihoodFor binary data $y$ (e.g., coin flip, pass/fail, diagnosed/not), an intuitive way to analyze is to use a Bernoulli model:$$ \begin{aligned} P(y = 1 \mid \theta) = \theta \\ P(y = 0 \mid \theta) = 1 - \theta \end{aligned},$$which is more compactly written as$$P(y \mid \theta) = \theta^y (1 - \theta)^{(1 - y)},$$where $\theta \in [0, 1]$ is the probability of a "1". You can verify that the compact form is the same as the longer form.### Multiple ObservationsWhen there are more than one $y$, say $y_1, \ldots, y_N$, that are conditionally independent, we have$$ \begin{aligned} P(y_1, \ldots, y_N \mid \theta) & = \prod_{i = 1}^N P(y_i \mid \theta) \\ & = \theta^{\sum_{i = 1}^N y_i} (1 - \theta)^{\sum_{i = 1}^N (1 - y_i)} \\ & = \theta^z (1 - \theta)^{N - z} \end{aligned},$$where $z$ is the number of "1"s (e.g., the number of heads in coin flips). Note that the likelihood only depends on $z$, not the individual $y$s. In other words, the likelihood is the same as long as there are $z$ heads, regardless of when those heads occur.Let's say $N$ = 4 and $z$ = 1. We can plot the likelihood in R:```{r}#| label: fig-lik#| fig-width: 3.5#| fig-height: 3#| fig-cap: Binomial likelihood function with $N$ = 4 and $z$ = 1# Write the likelihood as a function of thetalik <-function(th, num_flips =4, num_heads =1) { th ^ num_heads * (1- th) ^ (num_flips - num_heads)}# Likelihood of theta = 0.5lik(0.5)# Plot the likelihoodggplot(data.frame(th =c(0, 1)), aes(x = th)) +# `stat_function` for plotting a functionstat_function(fun = lik) +# use `expression()` to get greek letterslabs(x =expression(theta),y ="Likelihood with N = 4 and z = 1")```### Setting PriorsRemember again the relationship between the prior and the posterior:$$P(\theta | y) \propto P(y | \theta) P(\theta)$$The posterior distributions are mathematically determined once the priors and the likelihood are set. However, the mathematical form of the posterior is sometimes very difficult to deal with. One straightforward, brute-force method is to discretize the parameter space into a number of points. For example, by taking $\theta$ = 0, 0.05, 0.10, . . . , 0.90, 0.95, 1.00, one can evaluate the posterior at these 21 **grid points**.Let's use a prior that peaks at 0.5 and linearly decreases to both sides. I assume that $\theta$ = 0.5 is twice as likely as $\theta = 0.25$ or $\theta = 0.75$ to reflect my belief that the coin is more likely to be fair. ```{r}#| label: grid_df-prior# Define a grid for the parametergrid_df <-data.frame(th =seq(0, 1, by =0.05))# Set the prior mass for each value on the gridgrid_df$pth <-c(0:10, 9:0) # linearly increasing, then decreasing# Convert pth to a proper distribution such that the value# sum to onegrid_df$pth <- grid_df$pth /sum(grid_df$pth) # <1># Plot the priorggplot(grid_df, aes(x = th, y = pth)) +geom_col(aes(x = th, y = pth),width =0.01, ) +labs(y =expression(P(theta)), x =expression(theta))```1. This line ensures that the probability values sum to one. This is a trick we will use to obtain the posterior probability.::: {.callout-important appearance="minimal"}### Prior Predictive DistributionOne way to check whether the prior is appropriate is to use the **prior predictive distribution**. Bayesian models are **generative** because they can be used to simulate data. The prior predictive distribution can be obtained by first simulating some $\theta$ values from the prior distribution and then simulating a data set for each $\theta$.```{r}#| label: prior-predictive#| fig-width: 3.5#| fig-height: 3# Draw one thetanum_trials <-4# number of drawssim_th1 <-sample(grid_df$th, size =1,# based on prior probabilityprob = grid_df$pth)# Simulate new data of four flips based on modelsim_y1 <-rbinom(num_trials, size =1, prob = sim_th1)# Repeat many times# Set number of simulation drawsnum_draws <-1000sim_th <-sample(grid_df$th, size = num_draws, replace =TRUE,# based on prior probabilityprob = grid_df$pth)# Use a for loop# Initialize outputsim_y <-matrix(NA, nrow = num_trials, ncol = num_draws)for (s inseq_len(num_draws)) {# Store simulated data in the sth column sim_y[, s] <-rbinom(num_trials, size =1, prob = sim_th[s])}# Show the first 10 simulated data sets based on prior:sim_y[, 1:10]# Show the distribution of number of headssim_heads <-colSums(sim_y)ggplot(data.frame(z = sim_heads), aes(x = z)) +geom_bar()```The outcome seems to fit our intuition that it's more likely to be half heads and half tails, but there is a lot of uncertainty.:::### Summarizing the Posterior```{r}#| label: grid_df-postgrid_df <- grid_df |>mutate(# Use our previously defined lik() functionpy_th =lik(th, num_flips =4, num_heads =1),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Print a tableknitr::kable(grid_df)``````{r}#| label: fig-grid-post#| fig-asp: 0.618#| fig-cap: Bernoulli posterior distribution#| fig-subcap: #| - Prior and likelihood#| - Posterior#| layout-nrow: 2# Plot the prior/likelihood and the posteriorggplot(data = grid_df, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")ggplot(data = grid_df, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )```@fig-grid-post-2 shows the posterior distribution, which represents our updated belief about $\theta$. We can summarize it by simulating $\theta$ values from it and compute summary statistics:```{r}#| label: summarize-post-draws# Define a function for computing posterior summarysumm_draw <-function(x) {c(mean =mean(x),median =median(x),sd =sd(x),mad =mad(x),`ci.1`=quantile(x, prob = .1, names =FALSE),`ci.9`=quantile(x, prob = .9, names =FALSE) )}# Sample from the posteriorpost_samples <-sample( grid_df$th,size =1000, replace =TRUE,prob = grid_df$pth_y)summ_draw(post_samples)# Alternatively, use the `posterior` packagedata.frame(theta = post_samples) |> posterior::summarize_draws()```::: {.panel-tabset}### Influence of Sample SizeIf, instead, we have $N$ = 40 and $z$ = 10, the posterior will be more similar to the likelihood.```{r}#| label: grid_df-2#| fig.asp: 0.618grid_df2 <- grid_df |>mutate(# Use our previously defined lik() functionpy_th =lik(th, num_flips =40, num_heads =10),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Plot the prior/likelihood and the posteriorggplot(data = grid_df2, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")ggplot(data = grid_df2, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )``````{r}#| label: summarize-post-draws-2# Sample from the posteriorpost_samples <-sample( grid_df2$th,size =1000, replace =TRUE,prob = grid_df2$pth_y)summ_draw(post_samples)```### Influence of PriorIf we have a very strong prior concentrated at $\theta$ = .5, but still with $N$ = 40 and $z$ = 10, the posterior will be more similar to the prior.```{r}#| label: grid_df-3#| fig-asp: 0.618grid_df3 <- grid_df |>mutate(# stronger priorpth = pth ^3,# scale the prior to sume to 1pth = pth /sum(pth),# Use our previously defined lik() functionpy_th =lik(th, num_flips =4, num_heads =1),# Product of prior and likelihood`prior x lik`= pth * py_th,# Scaled the posteriorpth_y =`prior x lik`/sum(`prior x lik`) )# Plot the prior/likelihood and the posteriorggplot(data = grid_df3, aes(x = th)) +geom_col(aes(x = th -0.005, y = pth, fill ="prior"),width =0.01, ) +geom_col(aes(x = th +0.005, y = py_th /sum(py_th),fill ="scaled likelihood"), width =0.01, ) +labs(fill =NULL, y =NULL, x =expression(theta)) +theme(legend.position ="top")ggplot(data = grid_df3, aes(x = th)) +geom_col(aes(x = th, y = pth_y), width =0.01) +labs(fill =NULL, y =NULL, title ="Posterior",x =expression(theta) )``````{r}#| label: summarize-post-draws-3# Sample from the posteriorpost_samples <-sample( grid_df3$th,size =1000, replace =TRUE,prob = grid_df3$pth_y)summ_draw(post_samples)# Alternatively, use the `posterior` packagedata.frame(theta = post_samples) |> posterior::summarize_draws()```:::### Remark on Grid ApproximationIn this note, we discretized $\theta$ into a finite number of grid points to compute the posterior, mainly for pedagogical purposes. A big limitation is that our posterior will have no density for values other than the chosen grid points. While increasing the number of grid points (e.g., 1,000) can give more precision, the result is still not truly continuous. A bigger issue is that the computation breaks down when there is more than one parameter; if there are $p$ parameters, with 1,000 grid points per parameter, one needs to evaluate the posterior probability for $1,000^p$ grid points, which is not feasible even with modern computers. So more efficient algorithms, namely Markov chain Monte Carlo (MCMC) methods, will be introduced as we progress in the course.